In reality, the main difference between RNAV and RNP capable aircraft is its age. The aircraft that rolled off the production line before 2000 have older generation avionics and therefore do not have the same level of functionality as more modern aircraft. This generation of aircraft can be classified RNAV capable. A post 2000 built aircraft, with more modern avionics and GPS fitted will have significantly more capability and can be considered as RNP capable.
When ICAO instigated the development of the PBN concept there were already several area navigation applications in operation globally.
In the 1990s, industry introduced FANS 1A capable aircraft with a navigation solution provided by either multiple GPS receivers, multiple inertial navigation capabilities or a mixture of the two. Communications were either HF voice or datalink through the application of CPDLC and surveillance was either procedural or automatic dependent surveillance- contract (ADS-C).
For oceanic and remote continental airspace where there was little or no CNS infrastructure, the use of these on-board

navigation and communication capabilities permitted reductions in the separation standards applied between aircraft.
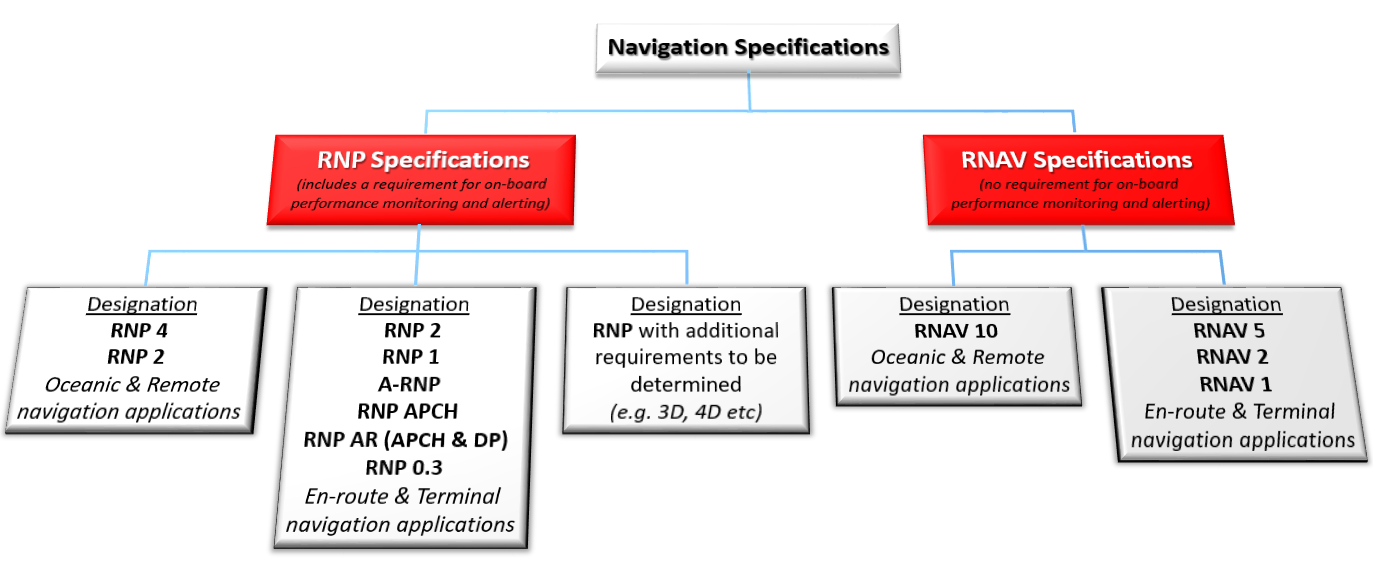
RNP 10 was an operational standard that was developed by the FAA and the Civil Aviation Safety Agency (CASA) of Australia. This specification required a +/- 10 NM lateral performance 95% of the flight time and, together with third party procedural position reporting, was/is good enough to support a 50 NM lateral and longitudinal separation standard.
PBN recognises this navigation application; however, as the certification to RNP 10 evolved ten years prior to the publication of the PBN manual, this navigation specification is in reality for an older generation of aircraft which were built in the last century. Therefore, although entitled RNP 10 (due to Grandfather rights) this specification does not require On-board Performance Monitoring and Alerting (OBPMA) and is therefore truthfully a RNAV specification.

This Navigation Specification was originally developed to support Europe’s first area navigation implementation in the 1990s. Originally called Basic RNAV (B-RNAV), RNAV 5 was designed to accommodate aircraft with first generation digital avionics such as the Lockheed TriStar L1011 in the en route environment. This generation of aircraft had very basic functionality and the navigation computer had to be manually loaded with navigation data; there was no requirement for a navigation database.
RNAV 5, requiring a lateral track accuracy of +/-5 NM 95% of the flight time, was never designed to be used to support SIDs and STARs and to bring aircraft close to or below the Minimum Sector Altitude (MSA), Minimum Flight Altitude
(MFA) or the Minimum Radar Vectoring Altitude (MRVA) whichever is the highest. Today, RNAV 5 may be used in the arrival phase of terminal procedures but must terminate by 30 NM from the Aerodrome Reference Point (ARP) and the procedures must be designed to en route design criteria.
Although designed to support an almost obsolete aircraft performance, RNAV 5 is the mandated en route ATS route performance for the SES. RNAV 5 is the only Navigation Specification that uses the VOR; the provision of more demanding lateral performance would see the need for VOR provision to support PBN operations disappear.
Like all RNAV Navigation Specifications, the RNAV 2 application precedes the PBN concept. This navigation application was developed in the US to support en route area navigation operations along ATS routes where there was limited DME/DME coverage; these ATS routes were commonly referred to as Q routes. Due to the location of the DME infrastructure, the ability to support a DME/DME position solution continually could not be guaranteed and therefore aircraft were permitted to ‘coast’ between DME pairs normally using an Inertial capability. As a 1 NM lateral track accuracy could not be consistently guaranteed, a lower level of performance was accepted.

Due to the deployment of the European DME infrastructure, the ability to provide a consistent en route performance of +/- 1 NM is not in question RNAV 2 has not been considered for European operations.
As the requirements for RNAV 2 are the same as RNAV 1, there has not been a dedicated certification standard for this navigation specification. Certification and operational approval to RNAV 1 automatically qualifies the aircraft and flight crew to RNAV 2.
With the publication of the navigation section of EASA's Certification Specification for Airborne CNS (CS-ACNS) all existing European certification documents have been superseded. As CS-ACNS only covers RNP certification, however, equivalency to meet RNAV specifications has been identified.

Both the US and Europe recognised that a higher level of lateral track accuracy was required to support area navigation operations as the aircraft came close to the terrain. The FAA developed a navigation application called US RNAV while within Europe we developed a complimentary navigation application to B-RNAV called Precision Area Navigation (P-RNAV). Both US RNAV and P-RNAV required a lateral navigation performance of +/- 1 NM 95% of the flight time. However, the navigation infrastructure to support this performance differed; in the US the infrastructure was only GPS or DME/DME whilst within Europe we also accepted the limited use of VOR/DME.
Within the US the certification to RNAV 1 was through Advisory Circular (AC) 90-100 whilst the certification to P-RNAV was the Joint Aviation Authorities (JAA) Temporary Guidance Leaflet (TGL) 10. Both certification standards underwent improvements to become AC 90-100A and TGL 10 Rev 1.
When the PBN concept was introduced in 2007, the inclusion of VOR within the TGL 10 Rev 1 certification was the major reason why an automatic transition to RNAV 1 for European operations did not take place. Today, the Europeans have recognised that as P-RNAV certification provides +/- 1 NM lateral accuracy performance and have accepted the term RNAV 1 although European aircraft and flight crews are certified and operationally approved to P-RNAV.
The introduction of the Certification Specification for Airborne CNS (CS-ACNS) has seen the cancellation of both previous Acceptable Means of Compliance (AMCs) and TGL 10, and in the future qualification to RNAV 1 will either be by equivalency to RNP 1 certification or by special acceptance by EASA.
RNAV 1 is the mandated minimum performance for future operations on SIDs/STARs and Transitions to all instrument runway ends (IREs). All EU States, EFTA States and those States with bi-lateral aviation agreements will be required to have one RNAV 1 SID/STAR to each IRE by 25 Jan 2024 and all SIDs/STARs for normal operations are to be RNAV 1 as a minimum by 6 June 2030. After that time all conventional procedures will be withdrawn or only provided as contingency operations.
RNP 4 is another Oceanic/Remote Continental navigation specification, which was developed prior to PBN, to provide aircraft with higher spec avionics more efficient routing. The navigation application takes credit for FANS 1A capable aircraft with GNSS, CPDLC and ADS-C avionics. With a RNP of +/- 4 NM 95% of the flight time and on-board performance monitoring and alerting (OPMA), the ICAO Separation and Airspace Safety Panel (SASP) have been able to develop reduced lateral and longitudinal separation standards; today, these are 23 NM laterally and 30 NM longitudinally with a 12 minute reporting rate over ADS-C.
Up until now, RNP 4 has been an operators choice rather than a mandated requirement along ATS routes. However, to operate on the new RLAT tracks between FL 350 and FL 390 in the North Atlantic Organised Track System (NAT), RNP 4 is a requirement.

RNP 2 is a Navigation Specification introduced in 2013 when the PBN Manual underwent it's first update. There were two distinct desires for this specification. One was a very 'high end' requirement to support oceanic operations by enabling more demanding separation standards than are possible with RNP 4 but this application would require high continuity (dual independent navigation systems) together with CPDLC and ADS-C. The second use of RNP 2 was foreseen to support older generation single system GPS enabled aircraft in low to medium density continental airspaces where there is little or no CNS infrastructure. In this case, ATS routes spaced 15 NM apart would provide safe separation between the flows of traffic. If the GPS receiver failed then the pilot could revert to alternative forms of navigation, which could include visual.
There was a debate as to whether there should be an Advanced and Basic level of RNP 2 to cover the two completely different applications of this specification.
However, the PBN SG was determined not to reintroduce the term when applied to a single lateral performance requirement. Therefore, a hybrid specification was developed which covers both oceanic and continental applications. Low end GA aircraft flying in places such as the outback in Australia, the Northern territories of Canada and Iceland only require a single GPS system. However, to qualify for oceanic operations using RNP 2 then dual navigation systems to enable high continuity with CPDLC and ADS-C must be demonstrated and certified.
When ICAO originally developed the PBN manual, the Study Group tasked to develop the manual foresaw a clear distinction in the application of RNAV 1 and RNP 1 for SIDs and STARs, and this was based on whether the terminal control area was a procedural or radar surveilled environment. If the TMA had a surveillance capability (nominally secondary radar providing independent surveillance), a lower level of aircraft functionality, no OBPMA, could be accepted as the controller was able to monitor the aircraft on their ATS routes and intervene if the pilot was not meeting the expected ATS route performance. If the TMA was procedural then having OBPMA functionality, available with RNP 1, could alert the ATM system with awareness when an aircraft was not meeting the airspace needs by providing the pilot with an ‘Unable RNP’ alert. Unfortunately, older first generation GPS receivers had a limitation on integrity alert switching from terminal (1 NM and 10 sec TTA) to en-route (2 NM and 30 sec TTA) performance and that was ‘hard-wired’ at 30 NM from the departure and arrival aerodrome reference points. It is for this reason that the PBN manual recommends the applicable maximum distance for RNP 1 should be limited to 30 NM; modern GPS receivers do not have this limitation and they cycle from terminal to en-route at the last waypoint of the SID and cycle back at the first waypoint of the STAR.

Therefore, RNP 1, like any Nav Spec, is not limited for use solely in procedural terminal airspace up to 30 NM from the aerodrome; however, if a PBN implementation team is planning RNP 1 then it should understand the basis behind why and how this navigation specification was evolved. The application of RNP 1 in larger TMAs and even en-route with or without ATS surveillance is possible provided issues such as integrity switching are understood and have been accounted for.
RNP 1 is not mandated by the PBN IR (EU 2018/1048); however, if a consistent, highly repeatable turn performance is needed to support SIDs/STARs, then the use of RNP 1 with Radius-to-Fix (RF) is permitted. The PBN IR calls for at least one PBN SID/STAR to be published at each instrument runway end (IRE) by 25 Jan 2024 and all SIDs/STARs to be PBN (a minimum of RNAV 1) by 6 June 2030. Further information on the PBN IR can be found here.
Certification standards for RNP 1 are published in the Certification Specification for Airborne CNS (CS-ACNS) together with those for RF certification. It should be noted that RF is not a required functionality of the RNP 1 specification. Therefore, airspace designers should take this into consideration when planning new procedures as it is possible that a percentage of the fleet operating to that location may not be capable of executing RF turns.
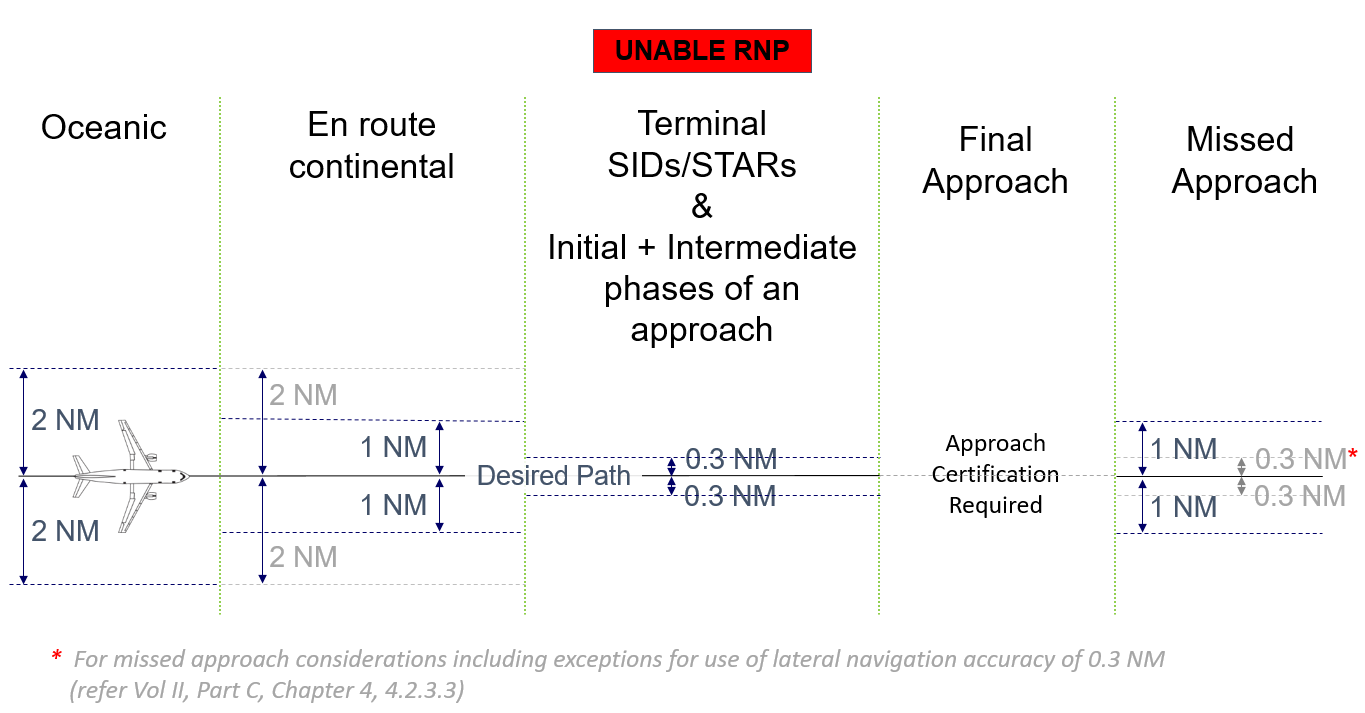
Advanced RNP (A-RNP) was originally developed as an ‘umbrella’ specification aimed to provide a single certification and operational authourisation to cover all phases of flight; however, it should be noted that for oceanic/remote continental operations the aircraft would need to demonstrate high continuity and be fitted with CPDLC and ADS-C. In early development, A-RNP was seen as a less demanding way of getting aircraft into terrain challenging environments and being a form of RNP (AR) APCH ‘Light’. To that end, the specification was designed with the option of scaleability down to RNP 0.3 that could be used to support terminal and initial/intermediate approach operations.
The lateral track performances are shown above left. The scaleability option for terminal operations was removed with the publication of the 5th edition of the PBN manual. Today, a performance of +/- 0.3 NM supports SID/STAR operations as well as the initial and intermediate phases of the approach. However, A-RNP does not cover Final Approach and therefore, the aircraft will require an approach certification as well. To qualify for PBN approach operations, the aircraft will needed to be certified and the crew authorised for RNP APCH and/or RNP (AR) APCH. It should be noted that although departures have a RNP value of +/- 0.3NM, the missed approach performance will be +/- 1NM; however, States may, on a exceptional basis and with a safety assessment, authorise +/- 0.3NM.
A-RNP requires the aircraft to have a RNAV holding function and the navigation computer requires a Radius-to-Fix (RF) functionality; RF requires the aircraft to be fitted with autopilot/flight director (AP/FD). RF provides ATM with a consistent and highly repeatable turn performance on Instrument Flight Procedures (IFPs); this will allow the same route spacing to be maintained on the straight and turning segments of closely spaced ATS routes in the terminal airspace.
Currently, there are very few aircraft qualified for A-RNP, however, A-RNP is foreseen to be an enabler for independent parallel approach operations (Mode 1), for runway spacings > 2224 m where +/- 0.3 NM performance outside the FAF/FAP is a significantly better performance than the +/- 1 NM provided by RNP APCH in the initial and intermediate phases of the approach.
RNP 0.3 is a dedicated Nav Spec for helicopters and takes credit for modern avionics and primarily SBAS receivers. The specification covers en-route continental operations down to the Final Approach Fix. The required performance is +/- 0.3NM 95% of the flight time. This specification does not support the Final Approach Segment, to operate inside the FAF requires a RNP APCH or better certification. Operational approval to RNP 0.3 for the crew is not covered under normal IR PBN training, this is a 'special' and it requires the crew to be specifically approved for the operation.
The Nav Spec lays out all the functionality required of the aircraft's avionics. However, the helicopters must be fitted with a Flight Guidance System (FGS) and for Instrument Flight Procedures (IFPs) the navigation computer must be capable of executing fly over and fly by waypoint transitions. Furthermore, the computer must be capable of automatically executing the following path terminators:
- Initial to Fix (IF)
- Course to Fix (CF)
- Course to Altitude (CA)
- Direct to Fix (DF)
- Track to Fix (TF)

In addition, the computer either automatically or with manual intervention, must be capable of executing:
- Heading to Altitude (VA)
- Heading to Manual Termination (VM)
- Heading to Intercept (VI)
and
- Fix to Manual Termination (FM)

RNP Approach (RNP APCH) is based on GNSS performance to provide lateral guidance (LNAV) on a non-precision approach (NPA). This removes the challenges of flying old, more complex conventional approaches, such as an NDB approach, and it has the advantage of enabling approaches to runways where no ground-based navigation infrastructure exists.
The expected performance on this type of approach is 1 NM in the initial and intermediate phases of the approach and 0.3 NM in the final approach phase and the design is normally a T or Y procedure with a fly-by turn onto the final approach track. Any operationally approved airspace user flying a RNP APCH certified aircraft can fly these procedures.
RNP APCHs can be 2D or 3D. If only a lateral path (LNAV) is defined for the procedure then the pilot is expect to fly a stabilised final approach; this is called a Continuous Descent Final Approach (CDFA). If the procedure designer defines a vertical path as well, the procedure is referred to as an approach with vertical guidance (APV). Guidance on the vertical path commences at the Final Approach Fix or Point and the vertical positioning is achieved either by barometric altimetry (APV Baro) or by geometric positioning using GPS plus a Satellite-based Augmentation System (SBAS); this is referred to as an APV SBAS.
The RNP APCH minima lines that can be published on the chart are:
|
2D (Lateral path only): |
Minimum |
Comments |
|
LNAV |
MDA/MDH1 |
Pilot expected to fly CDFA |
|
LP (Localiser Performance) |
MDA/MDH1 |
Pilot expected to fly CDFA |
|
|
|
|
|
3D (Lateral and vertical path defined) |
|
|
|
LNAV/VNAV |
DA/DH2 |
APV Baro |
|
LPV |
DA/DH2 |
APV SBAS |
1. Minimum Descent Altitude/Height – based on Minimum Obstacle Clearance Altitude, which the aircraft is not expected to go below.
2. Decision Altitude/Height – the point at which the pilot will look up from the instrument panel and make the decision to land or fly missed approach. Due to the descending trajectory of the aircraft at point of decision, the designer allows for height loss from that altitude whilst the engines ‘spool’ up if a missed approach is initiated.
RNP Authorisation Required (AR) operations covers approach & departure (APCH & DP) are normally complex and very demanding procedures; RNP AR DP criteria were added into the PBN manual in Edition 5. These operations are designed to take credit for the very accurate navigation performance some aircraft are capable of and to enable operations in 'terrain rich' environments. All RNP (AR) APCHs are 3D operations with a lateral and vertical path defined by the procedure designer. The procedures are based on GNSS performance and the navigation specification defines a specific vertical error budget that must be achieved. The aircraft must be fitted with an inertial navigation capability to enable extraction in case of a GNSS signal loss or failure.
The terrain or the operational need will drive the design of these types of procedures and the designer can use radius-to-fix (RF) path terminators to ensure a consistent and highly repeatable turn performance.

The performance along the path can be from +/-1 NM down to +/- 0.1 NM. The tighter the lateral performance has to be, the smaller the number of aircraft that can fly the procedure. Similarly, the tighter the required lateral accuracy, the higher the cost for the aircraft operators (AOs).
RNP AR APCH can also be used to support independent parallel approach operations and there is a good example of this to be found at Calgary (CYYC).
RNP AR APCH is a special authorisation operation and pilots will need approval that is in addition to the PBN privileges provided a standard IR training provides be an approved training organisation (ATO).