Area navigation techniques provide the foundation on which the PBN concept is built.
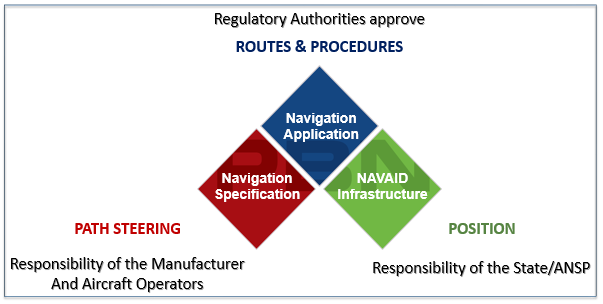
(ntn) Area navigation techniques have been around since c. the 1970s, but how these techniques were used was not standardised across the globe. In 2008 this ‘messiness’ was cleaned up with the publication of the PBN Concept in the ICAO PBN Manual. Through the PBN Manual, ICAO took area navigation techniques, and current applications of it, and created a packaged system called ‘PBN’ which is based on the use of area navigation techniques, an area navigation system (RNAV system) and standardised aircraft certification qualifications called Navigation Specifications which are interoperable and recognised everywhere in the world. Navigation Specifications are one of the PBN Concept’s three components. Each navigation specification ‘guarantees’ that the aircraft will adhere to its path, as prescriptive performance measures are included in each specification. The closer to the ground that the PBN operation is envisaged for approach and landing, the ‘tighter’ and more demanding the performance requirements particularly those related to accuracy, integrity and continuity.
Area navigation (RNAV) is a method of navigation which permits aircraft operation on any desired flight path:
- within the coverage of station-referenced NAVAIDS, or
- within the limits of the capability of self-contained systems, or
- a combination of these capabilities
Area Navigation uses (most, but not all) the same Navaids as those used for conventional procedures. Navaids may be space- or ground-based and their role is to enable an aircraft to determine its position. But the way in which the Navaids are used in an area navigation context is different to the way in which they are used for conventional procedures.
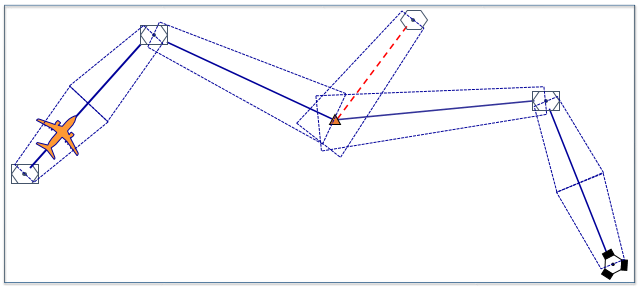 Typically, with conventional navigation, ATS routes (including SIDs/STARs) are designed with ground-based Navaids (or a bearing and distance from these) defining the start and/or the end of the route ‘legs’. The net effect of this reality is that most published conventional routes pass overhead Navaids, thereby restricting route placement and flexibility of design. This lack of flexibility may explain why SIDs/STARs (in particular) are often ‘ignored’ by controllers who opt to provide aircraft with radar vectors. Essentially, conventional SIDS/STAR placement is generally inadequate given the restrictions of ground-navaids.
Typically, with conventional navigation, ATS routes (including SIDs/STARs) are designed with ground-based Navaids (or a bearing and distance from these) defining the start and/or the end of the route ‘legs’. The net effect of this reality is that most published conventional routes pass overhead Navaids, thereby restricting route placement and flexibility of design. This lack of flexibility may explain why SIDs/STARs (in particular) are often ‘ignored’ by controllers who opt to provide aircraft with radar vectors. Essentially, conventional SIDS/STAR placement is generally inadequate given the restrictions of ground-navaids.
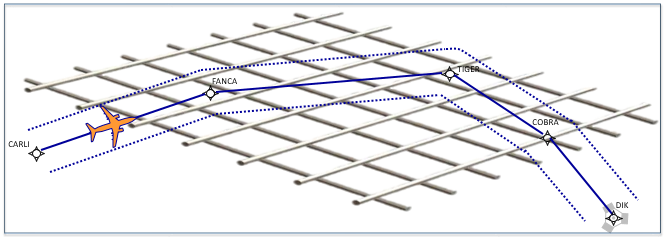 In contrast, an area navigation system ‘accepts’ position information via a variety of sensors and from all available Navaids. A positioning ‘mesh’ (like a ‘net’) is provided over an area and it is this ‘mesh’ which is one of the key reasons that an aircraft can navigate point to point (from waypoint to waypoint) anywhere under that ‘mesh’.
In contrast, an area navigation system ‘accepts’ position information via a variety of sensors and from all available Navaids. A positioning ‘mesh’ (like a ‘net’) is provided over an area and it is this ‘mesh’ which is one of the key reasons that an aircraft can navigate point to point (from waypoint to waypoint) anywhere under that ‘mesh’.
This provides significant flexibility to the airspace designer. This also enables Free Route Airspace (FRA) operations.
(ntn) These positioning sources were ‘imported’ into PBN except for NDB and for VOR (in 99% of the cases, the exception is RNAV 5 which allows VOR). In PBN, these positioning sources are known as the Navaid Infrastructure, which is one of PBN’s three components.
Before RNAV and RNP were packaged and systemised into PBN, GNSS which is part of the Navaid Infrastructure, could also be used for conventional navigation (as a positioning source), though the to/from Navaids was a challenge! Given its global availability and its ability to provide outstanding accuracy, GNSS plays a key role in PBN as a positioning source, and it has taken first place to determine an aircraft’s position. A downside in using this first-rate positioning source is its vulnerability to interference. That is why GNSS contingency procedures must be in place for ATM to operate in the event of GPS becoming unusable.
(ntn) GNSS is a generic term. It includes all global constellations that provide positioning, navigation and timing for aviation e.g. GPS and GLONASS (next ntn), as well as associated augmentation systems of which there are two kinds: (i) regional Satellite-Based Augmentation Systems (SBAS) and (ii) local Ground-Based Augmentation Systems (GBAS). Europe’s SBAS system is known as EGNOS. It's primary use in PBN is to support the approach phase of flight.
(ntn) GPS provides a global positioning service, as does GLONASS (the Russian system), as will Galileo (the EU system) and Beidou (the Chinese system) in the future. In reality, only GPS is used today (2021) outside Russia and some CIS States. Without a mandate (legal requirement) for aircraft operating in Europe to have multi-constellation receivers i.e. capable of receiving two or more core constellations, it is unlikely that this capability would be available 'naturally' on board the world fleet by 2040. As of 2021, only GPS and GLONASS have IFR certified receivers available on the marketplace for installation on aircraft. Therefore, if one thinks that an aircraft stays in service for +/- 25 years, the 2040 timeline could be considered optimistic.
Sometimes, when GNSS is referred to, people mean only GPS, and at other times, GNSS means all the constellations and all the different kinds of augmentation. The meaning can usually be extracted from the context.
To achieve this waypoint-to-waypoint navigation (i.e. area navigation techniques), the aircraft has an on-board area navigation system (RNAV System, effectively a computer). In commercial air transport aircraft this RNAV system is usually a component in the Flight Management System (FMS) or Flight Management Computer (FMC). Using the navigation computer, Waypoints (geographic coordinates) are normally loaded into the computer from an integrated database. Routes are created by a series of waypoints i.e. a flight plan. The on-board Computer estimates position using navigation sensors fitted to the aircraft and compares the estimation to the defined route. Deviation between the estimated position and defined path will create guidance information.
(ntn) an RNAV system, with or without an FMC/FMS is also needed for PBN. In fact, the PBN concept does not permit the use of an RNAV system outside a PBN environment.
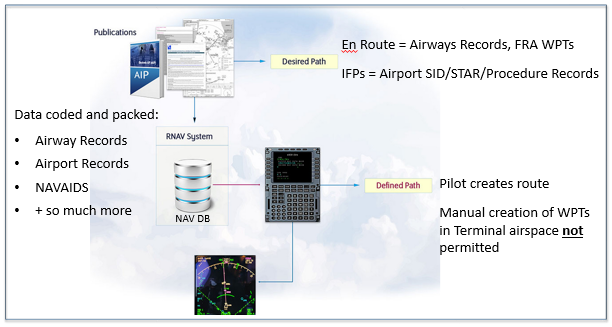 PBN specifications require the on-board navigation computer to have a navigation data base (RNAV 5 is the exception, for legacy reasons). State information including routes, procedures and navaids published in the AIPs are loaded into the navigation database. This information is collated by professional DAT Providers (sometimes called Data houses e.g., Jeppesen, Nav Blue and Lufthansa Flight Systems), who code the information ready for loading into the databases using a specific computer language/format (ARINC 424). Strict time periods defined by ICAO exist and must be respected for the creation and loading of the data which can only have an AIRAC date as the effective start date.
PBN specifications require the on-board navigation computer to have a navigation data base (RNAV 5 is the exception, for legacy reasons). State information including routes, procedures and navaids published in the AIPs are loaded into the navigation database. This information is collated by professional DAT Providers (sometimes called Data houses e.g., Jeppesen, Nav Blue and Lufthansa Flight Systems), who code the information ready for loading into the databases using a specific computer language/format (ARINC 424). Strict time periods defined by ICAO exist and must be respected for the creation and loading of the data which can only have an AIRAC date as the effective start date.
(ntn) In the twenty-eight (28) days before effective date, the ‘data’ is frozen and the only way to ‘cancel’ it or ‘alter’ it is via a NOTAM. This happens very rarely – and should not happen at all. If errors are identified in the navigation database, it should be noted that pilots are physically inhibited from making changes to the navigation database. Put differently, pilots cannot correct a problem because it is not possible to alter the navigation database.
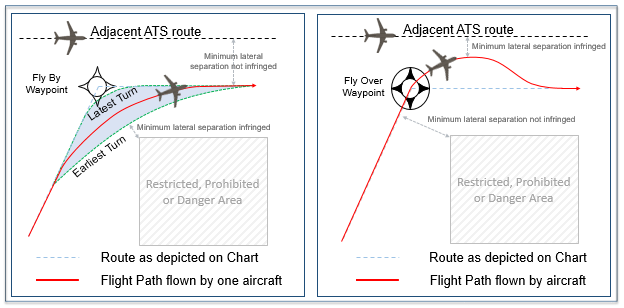 Although PBN is the systemised, organised, packaged use of RNAV and area navigation techniques, this does not mean that aircraft navigation using PBN is perfect – even when using an on-board navigation computer to navigate. It is obvious to state, that aircraft either fly straight segments or they fly turning segments (and they may be in level flight or climbing and descending as well). When it comes to turning, aircraft can fly past a waypoint, this is called a FLY BY turn, or they can fly over a waypoint before initiating the turn, and this is called a FLY OVER turn. With a FLY BY turn, controllers can expect a spread of flight paths throughout the turns which may impact upon separation assurance; this is likely to be more significant at higher altitudes.
Although PBN is the systemised, organised, packaged use of RNAV and area navigation techniques, this does not mean that aircraft navigation using PBN is perfect – even when using an on-board navigation computer to navigate. It is obvious to state, that aircraft either fly straight segments or they fly turning segments (and they may be in level flight or climbing and descending as well). When it comes to turning, aircraft can fly past a waypoint, this is called a FLY BY turn, or they can fly over a waypoint before initiating the turn, and this is called a FLY OVER turn. With a FLY BY turn, controllers can expect a spread of flight paths throughout the turns which may impact upon separation assurance; this is likely to be more significant at higher altitudes.
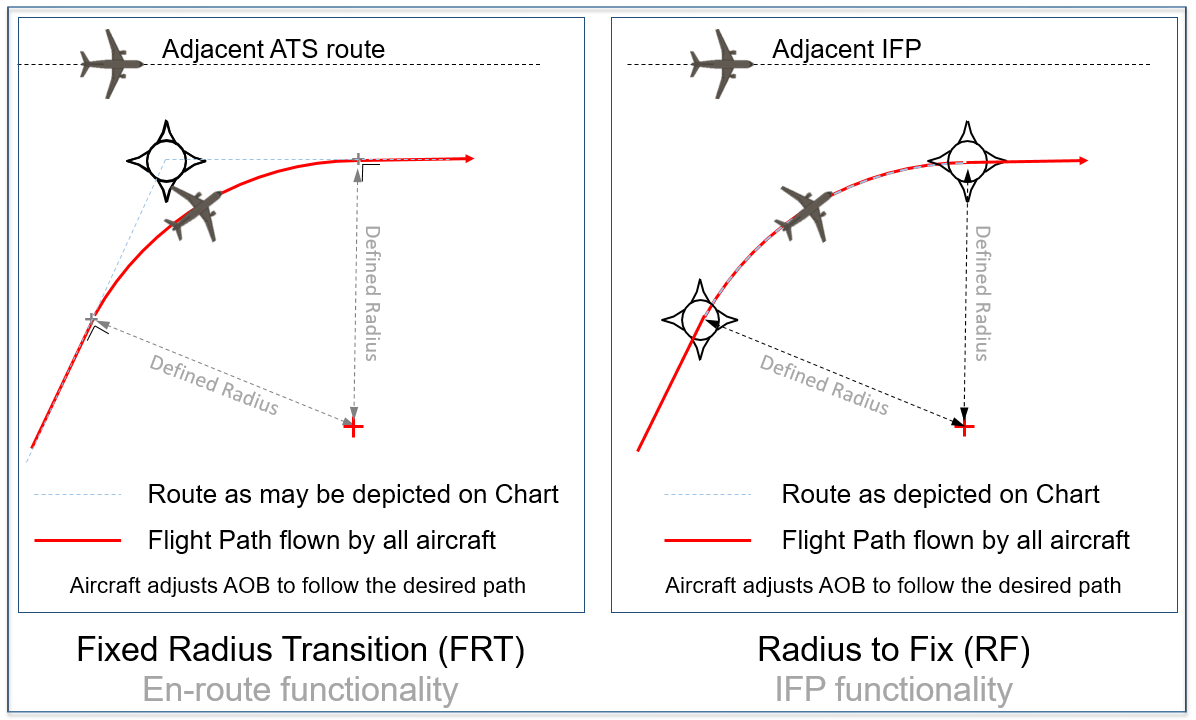 There are more sophisticated ways in which an on-board navigation computer can turn an aircraft. Some on-board navigation computers have the ability to provide predictable and highly repeatable turns so there is no risk of turn spread such as with the FLY BY or FLY OVER turns.
There are more sophisticated ways in which an on-board navigation computer can turn an aircraft. Some on-board navigation computers have the ability to provide predictable and highly repeatable turns so there is no risk of turn spread such as with the FLY BY or FLY OVER turns.
The Fixed Radius Transition (FRT) is associated with en route ATS Routes. It is not a mature function and as yet is not required or employed anywhere. The Radius to Fix (RF) is associated with RNP SIDS/STARs and IAPs.
(ntn) Routes can be random routes or fixed ATS Routes including SIDs/STARs and instrument approach procedures. Fixed routes and procedures are published in the AIP. Trajectories in Free Route Airspace (FRA), fixed ATS Routes (including SIDs/STARs) as well as instrument approach procedures are the third PBN component: the Navigation Application.
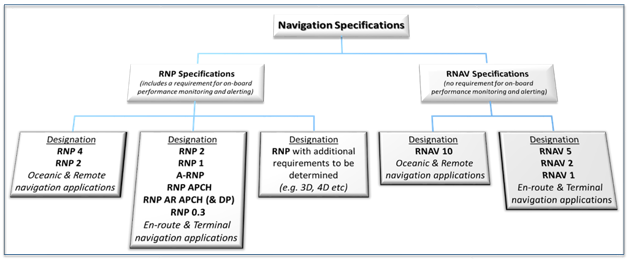
 The PBN Manual, ICAO Doc 9613 contains 11 navigation specifications which spell out the performance requirements captured in aircraft certification specifications, crew requirements, positioning requirements for each specific operation. Each navigation specification has a designation, a name. Some have the prefix RNAV e.g. RNAV 5, RNAV 1, others have the prefix RNP e.g. RNP 1, RNP APCH.
The PBN Manual, ICAO Doc 9613 contains 11 navigation specifications which spell out the performance requirements captured in aircraft certification specifications, crew requirements, positioning requirements for each specific operation. Each navigation specification has a designation, a name. Some have the prefix RNAV e.g. RNAV 5, RNAV 1, others have the prefix RNP e.g. RNP 1, RNP APCH.
The ‘RNP’ specifications are usually more demanding, more sophisticated and as such, more advanced functions such as RF and FRT can only be associated with an RNP specification. The number after the RNAV or RNP refers to the lateral navigation lateral accuracy required 95% of the flight time. If there is no number after the letters RNP, this is because the lateral navigation accuracy is not the same in each flight phase where the navigation specification can be used.
More than 97% of the aircraft fleet operating in Europe has GPS fitted as a positioning sensor. This means that it is likely to be used as the main positioning sensor by the area navigation system because the navigation computer has a hierarchy of which navigation sensor (positioning source) to use. Being the “best in class”, GPS will invariably be the primary sensor chosen by the navigation computer to determine an aircraft's position, followed by DME/DME if the aircraft is fitted with those sensors, and the required navigation infrastructure is available.