PBN en route ATS Routes mostly connect between the FRA to the SID/STAR system in a terminal area. As from 2024, all these ATS Routes must be RNAV 5.
Where a STAR and IAP begin, or end is not standardised. Some airspaces have the STAR ending at the terminal airspace boundary (typically when a holding pattern is placed there as a sequencing tool) followed by an IAP, and in others, STARs begin at the terminal airspace boundary and end at the IAP whose ‘start’ point is either at the initial approach or intermediate fix. In either case use the same designation convention and RTF is used for the STAR (e.g. cleared KODAP 2A).
(ntn) WHERE A ‘SECOND’ STAR IS NEEDED to continue track guidance to the final approach segment SOME ANSPs INTRODUCED ‘TRANSITIONS’: Where a STAR has been positioned to end at terminal entry, a ‘second STAR’ may be needed within the terminal airspace before the instrument approach procedure. As the FMS does not accommodate a second STAR on a single procedure in an FMS, affected ANSPs have devised FMS-based terminology for this second STAR using expressions like RNAV Arrival, GPS Transition, FMS Transition etc. These terms are non-ICAO and can create confusion but are widely used because the need is unequivocal. ICAO is working to standardise the naming/terminology for this phase of flight. Further reading on this subject can be downloaded here.
To fly a SID, an aircraft must be able to receive positioning information that enables the SID to be flown from the departure end of the runway. At low altitudes, for example, this may not be possible (we do not have the equivalent of an ILS for departure, though in extremely rare instances, the ILS back-beam has been used). Therefore, the initial departure flight segment may sometimes be conventional to permit the aircraft to reach sufficient altitude to begin flying the PBN SID. This is also a kind of ‘departure transition’ in the FMS.
The PBN IR has taken a two-step, phased approach such that by 2030, all SIDs/STARs for fixed wing aircraft at IRE’s of EU Treaty States are required to be based on either RNAV 1 (as a minimum) or RNP 1 (option). See N2K - #11.
Where conventional SIDs/STARs are comprised of flight segments typically between NAVAIDS or fixes which are an intersection of two VOR Radials or a VOR/DME position, with PBN the ‘fixes’ are called waypoints and can be placed anywhere. The on-board computer is coded with instructions on what to do between the instrument flight procedure waypoints. ARINC 424 calls these ‘instructions’ Path Terminators (see (ntn) under N2K – #6); these are understood by the area navigation computer which permits adherence to flight paths. Typical Paths & Terminators are, for example, Course to a Fix (CF), Direct to a Fix (DF), Heading to Manual Termination (HM), Radius to Fix (RF, Radius to fix – see N2K – #7) and the Heading to Next Leg (VI) path terminator enables the pilot to create a Vector to Final (VTF) intercept.
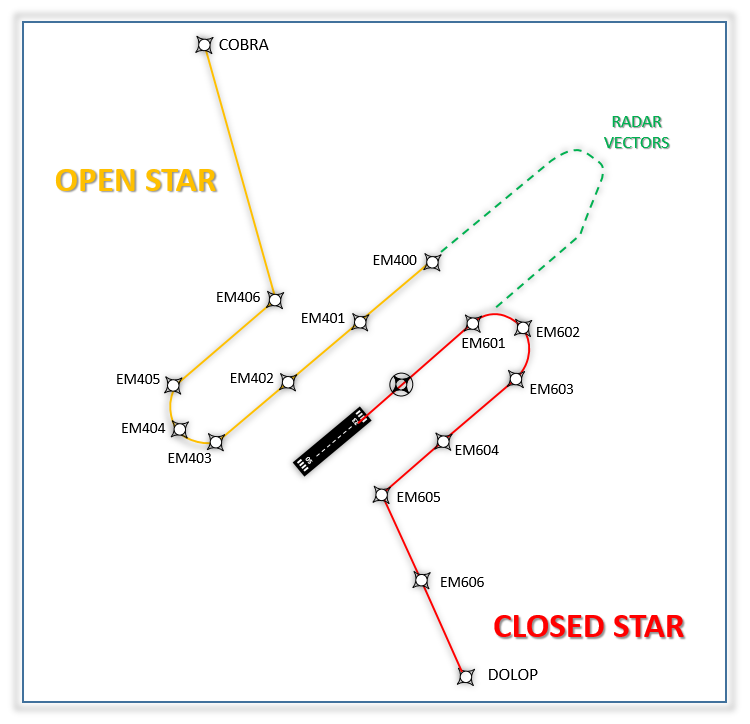 Depending on where the IAP begins, the STAR or the IAP can be 'open' or 'closed':
Depending on where the IAP begins, the STAR or the IAP can be 'open' or 'closed':
- An Open procedure is one where the track guidance provided by the published procedure typically terminates on downwind and requires the Controller to guide the aircraft onto final approach.
- A Closed Procedure is one where the track guidance to the final approach is provided by the published RNAV or RNP procedure, (see N2K – #36). Typically, closed procedures would be T or Y procedures (see N2K – #51).
A STAR or non-ICAO ‘arrival transition’ can be followed either by Radar Vectors (see N2K – #35), an RNP APCH (required by the PBN IR effective 2030), an ILS or GLS approach. The capture of the ILS Localizer may not always be straightforward because the aircraft is required to ‘switch’ from a GPS-based system (RNAV/RNP) to a non-GPS landing system (ILS). This can incur avionics/FMS management workload for the flight crew. In contrast, if the STAR is based on PBN using GPS and connects to an IAP using RNP or GBAS, this is operationally less complex for the flight crew and therefore tends to generate less workload.
The use of Heading to Next Leg (VI) path terminator permits pilots to set up a vector to intercept the Final Approach (VTF) track which the FMS will follow.
IMPORTANT! The way VTF is implemented is not standardised in different aircraft avionics; thus in some cases, the use of VTF may increase flight crew workload.
REMINDER! Just as it remains good ATC practice not to offer the flight crew a change in landing runway too close to the airport, it is equally good practice not to expect the flight crew to change the technology or type of approach to be used for landing at a late stage. The workload risks being too high because a new procedure would have to be loaded into the RNAV computer and briefed by the flight crew.
Systemisation means that flows are laid strategically laid out / planned to enable the best performance for a population of aircraft operating on the routes with minimum hindrance to their flight efficiency.
Strategic deconfliction means that for the arrival/departure flows the separation minima are ‘built into’ the design of the systemised SIDs/STARs. In fact, systemisation and strategic-deconfliction go together. In a European ATS Surveillance context, strategic deconfliction means that if 3 NM lateral or 1000 ft vertical separation minima is applied in the Approach, the ‘built in’ lateral separation minima for routes in potential conflict would be 4-5 NM i.e. 3 NM plus a margin or vertical separation minima of 1000 feet.
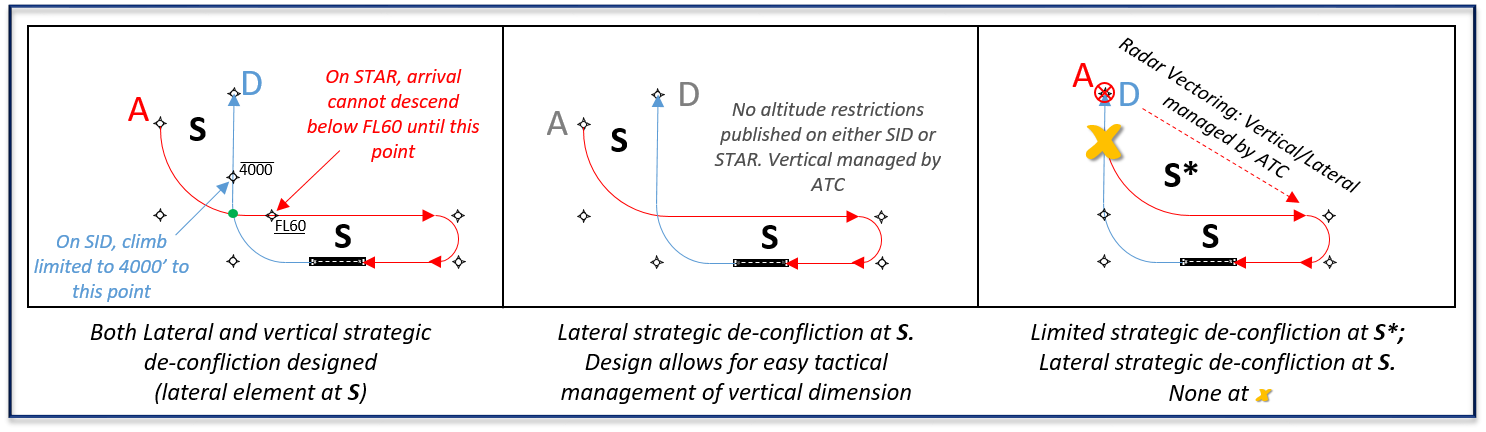
When SIDs/STARs are well designed to ensure strategic deconfliction, the deconfliction is assured laterally and/or vertically.
Note: Two same direction parallel routes can be placed a 2NM distance if there is no intention for the aircraft to fly at the same flight levels on those routes. i.e. vertical rather than lateral separation is assured. However, if the intention is for two aircraft to operate at the same flight levels on parallel routes, then the spacing would be 4-5 NM+ in an environment where the surveillance separation minima is 3 NM, for example.
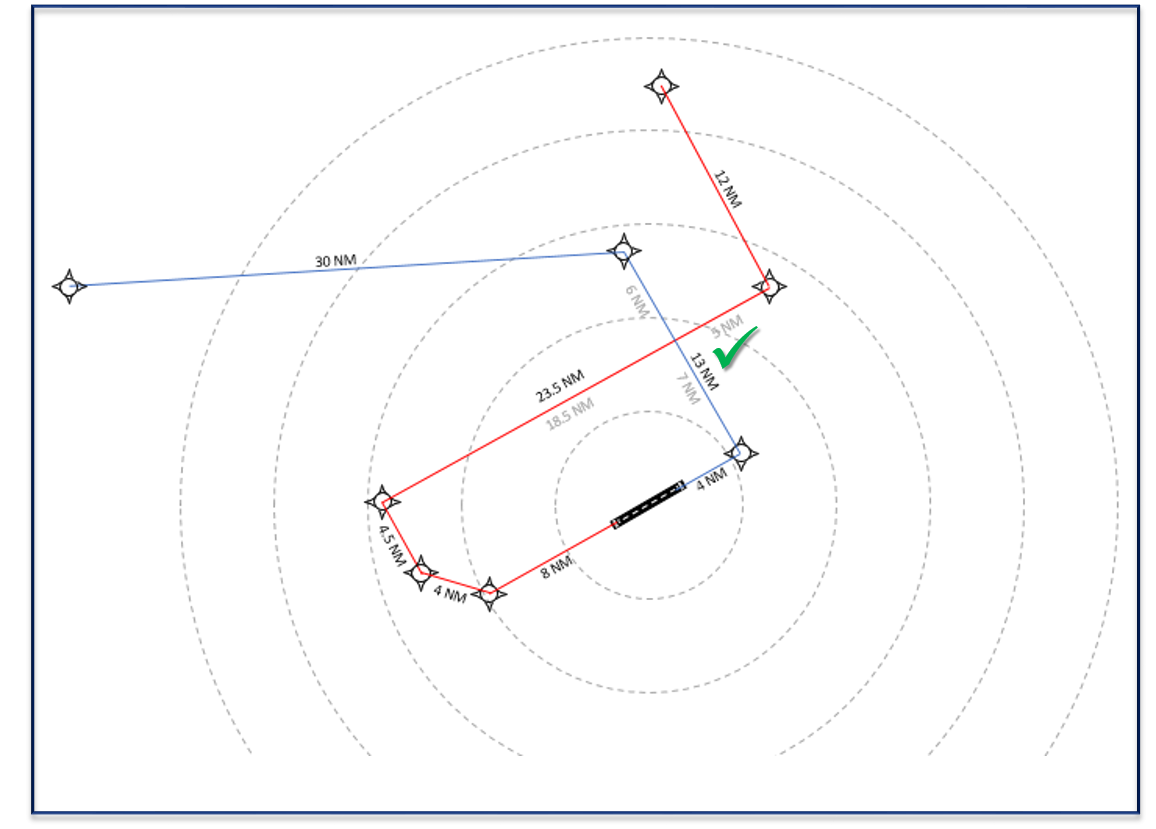
Where a SID and STAR cross determines whether the aircraft’s climb or descent will be unnecessarily restricted. If aircraft cross close to the departure/landing runway(s) at the same airport, this often ensures that minimum restriction is needed for each aircraft. (See the green tick in the diagram).
The track distance for the arrival and departing aircraft to travel can be calculated to/from the crossing point: Track miles from the departure end of runway is 11NM and there are 35NM to touchdown. Simple airspace planning tools such as the Vertical Interaction tool allow designers to see what vertical spacing can be expected at the crossing point based on climb gradients and descent angles.
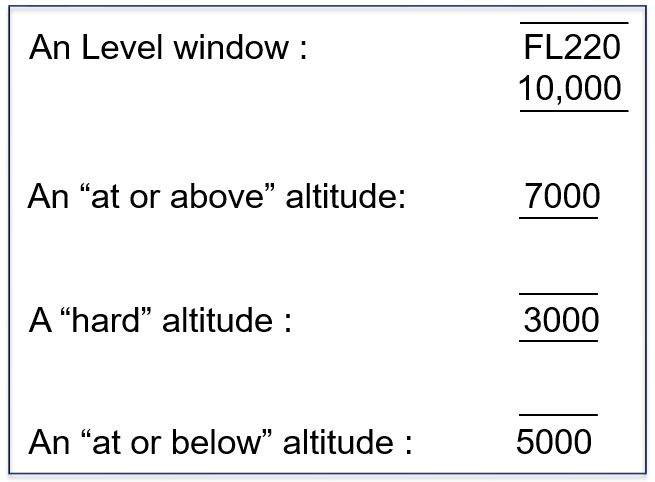 As with speed restrictions, vertical restrictions applicable on SIDs/STARs are marked on charts which allows the vertical profile of the aircraft to be managed by the RNAV system outside the final approach segment. Procedures can be designed with level restrictions at a waypoint that can be designated as ‘AT’, ‘AT OR ABOVE’ or ‘AT OR BELOW’ a particular level, or a range between an upper and lower level may be permitted creating a ‘window’.
As with speed restrictions, vertical restrictions applicable on SIDs/STARs are marked on charts which allows the vertical profile of the aircraft to be managed by the RNAV system outside the final approach segment. Procedures can be designed with level restrictions at a waypoint that can be designated as ‘AT’, ‘AT OR ABOVE’ or ‘AT OR BELOW’ a particular level, or a range between an upper and lower level may be permitted creating a ‘window’.
ATC can give a short cut to an aircraft requiring it to leave the ‘active’ procedure and proceed to a waypoint. To this end, ATC gives an explicit instruction to a waypoint. When such explicit instructions are given, the ‘go to’; waypoint must be associated with the SID or STAR or IAP that is ‘active’ in the FMS at the time. If there is no intent to have the aircraft resume the active procedure, it is good practice to vector the aircraft to a point from which:
- In the case of an arrival, the aircraft can commence the instrument approach procedure.
- In the case of a departure, the aircraft can continue on flight plan route e.g. on an en route ATS route or operations in FRA.
As explained in N2K – #41, heading, level and speed restrictions can be coded into the SID, STAR or IAP and there are conventions for showing this on the chart. If a controller gives the aircraft an explicit instruction to route directly to a waypoint later on in the procedure, altitude and speed restrictions associated with any ‘missed out’ waypoints will not be respected because the aircraft is not flying via them. In the diagram to the right, where the procedure starts at DOLOP and goes to the FAF marked AM416, if the aircraft is given a shortcut from AM410 directly to AM413, then the altitude restriction at AM411 will not be complied with.

ICAO PANS-ATM permits Mode 1 & 2 Simultaneous Parallel Approach Operations using any combination of ILS, GLS and RNP AR APCH to each of the parallel runways. In exceptional cases, RNP APCH could be used, but the burden associated with the additional safety assessment (as well as the +/-1 NM aircraft performance prior to the Final Approach Fix) may explain why it is not used in Europe.
Over 95% of the ECAC commercial air transport fleet is equipped with DME/DME and a rich DME infrastructure is available across ECAC. As such, it is expected that the contingency procedure of choice for RNAV 1 or RNP 1 would be RNAV 1 based on D/D with or without IRU provided that the fleet capability and Navaid Infrastructure confirm this possibility. These contingency procedures for the continued safe provision of the approach control service should be included in the local operating instructions of the ATCU and published in the AIP. See N2K – #16.
The lower a DME/DME equipped aircraft on a published PBN procedure gets to the ground, even in a DME rich environment, the more likely that the positioning ‘mesh’ will not provide total positioning coverage. Therefore, it may be necessary to vector the aircraft towards the final approach track. It is essential that the aircraft be able to complete the instrument approach procedure using either ILS or a visual approach or some conventional procedure such as VOR/DME if published (e.g. for contingency).